Robust
lane markings detection and road geometry computation.
This web page contains the results in video form of the paper
Robust lane markings detection and road geometry computation
A. López1, J. Serrat1, C. Cañero1, F. Lumbreras1 and T. Graf 2
1Computer Vision Center and Compt. Science Dept., Universitat Autònoma de Barcelona, 08193 Cerdanyola, Spain
2 Electronics Research, Volkswagen AG, Wolfsburg, Germany
International Journal of Automotive Technology, Vol. 11, No. 3, 2010, pp. 395-407, DOI: 10.1007/s12239-010-0049-6.
Note : all videos haave been compressed with the DivX 5.1.2 codec.
Abstract
Detection of lane markings based on a camera sensor can be a low cost solution to lane departure and curve over speed warning. A number of methods and implementations have been reported in the literature. However, reliable detection is still an issue due to cast shadows, wearied and occluded markings, variable ambient lighting conditions etc.
We focus on increasing the reliability of detection in two ways. Firstly, we employ a different image feature other than the commonly used edges: ridges, which we claim is better suited to this problem. Secondly, we have adapted RANSAC, a generic robust estimation method, to fit a parametric model of a pair or lane lines to the image features, based on both ridgeness and ridge orientation. In addition this fitting is performed for the left and right lane lines simultaneously, thus enforcing a consistent result. Four measures of interest with regard several driver assistance applications are directly computed from the fitted parametric model at each frame: vehicle yaw angle and lateral offset with regard the lane medial axis, and lane width and curvature.
We have qualitatively assessed our method in video sequences captured on several road types and under very different lighting conditions. Also, we have quantitatively assessed it on synthetic but realistic video sequences for which road geometry and vehicle trajectory ground truth are known.
Contents
1. Synthetic sequence
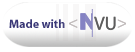
The non-ideal camera sequence simulates, in addition to changes in road slope, curvature, contrast and vehicle direction, the change in camera pitch due to uneven road, brake actioning and acceleration. Below, we show the original sequence and, superimposed, the detected lane lines. In red, ridge points considered outliers, in yellow, inliers.
 Original 'non-ideal camera'
sequence
|
 Lane lines detection, 1 horizon lines tried
|
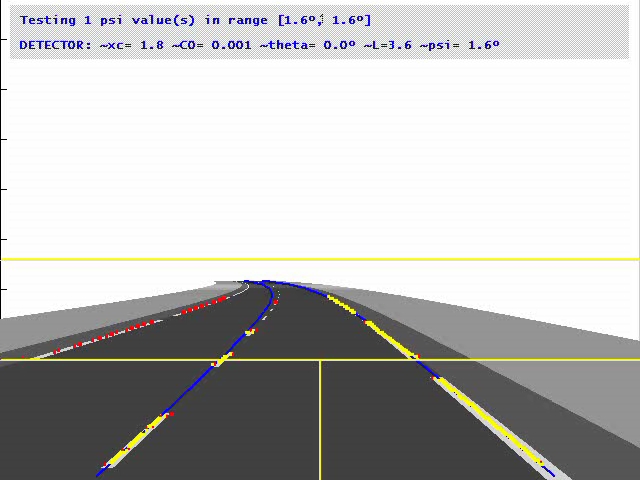
 Lane lines detection, 7 horizon lines
tried
|
Matlab source code for generating synthetic sequences can be downloaded here. This original sequence and all the parameters to generate it, here. If you find it useful, please cite our paper (reference above).
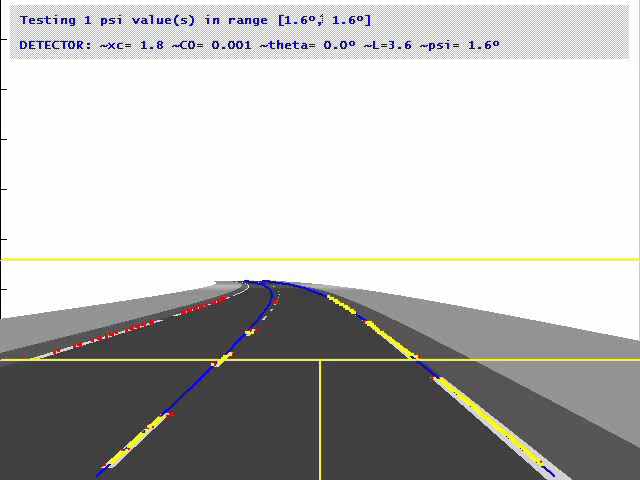
2. Real sequences
Here we show the lane lines dection for sequences containing specially challenging situations like drastic contrast changes, dense traffic, occlusions of lane markings, night time, reflexions, etc. Real sequences were captured with three cameras built on different sensors :
| Camera | Sensor | Lens |
| CCD | ICX084 CCD 1/3" 8 bits per pixel, Bayer pattern. | 6 mm |
| CMOS | LM9618 CMOS 1/3", 12 bits per pixel (experimental camera) | 6 mm |
| Videocamera | Consumer digital miniDV videocamera, Bayer pattern | 35mm |
a) CCD camera
 Highway straight segment, lane change and tunnel |
 Highway, tunnel
|
 Two roundabouts, tree shadows
|
b) CMOS camera
 Highway
|
 Highway, curves, lane
changes, lane exit
|
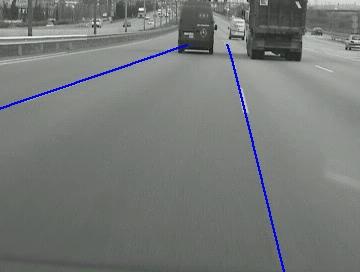
 Highway, straight segment,
occlusions (truck)
|
 Highway, curves, lane
changes, shadows
|
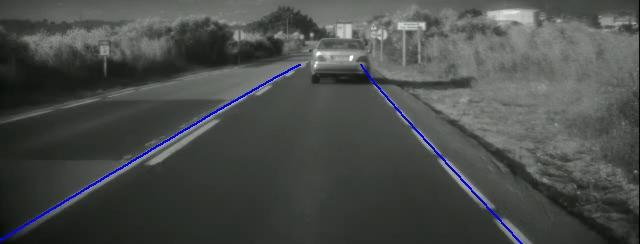 Free road, oncoming traffic,
car and tree shadows
|
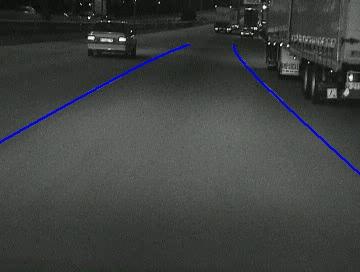
Night time
 Highway, dense traffic
|
 Highway, dense traffic
|
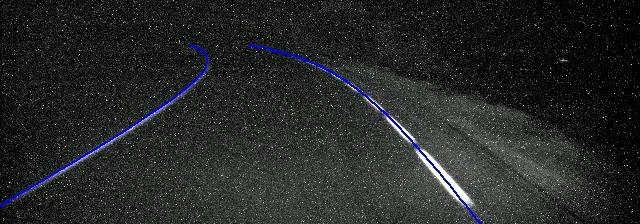 Free road, no traffic
|
 Free road, some
oncoming vehicle
|
|
c) Consumer digital videocamera
 Highway, gentle curves
|
 Highway, straight segment
|
 Highway, night time
|
d) Preliminary temporal coherence experiment
 CMOS camera, highway. Red
region is the lane line search space
|