CVC-09 FIR Sequence. Pedestrian Dataset
| The sequence is composed by two sets of images, named as the day and night sets, which refers to the moment of the day they were acquired. The first set contains 5990 frames and the second 5081, divided in training and testing sets each sequence. |
| Here are some examples of the dataset: |
References to this pedestrian dataset should be made to the following article:
Download: CVC-09 FIR Sequence (1.87 Gb)
Please, read the terms of use before downloading the dataset: disclaimer |
CVC-08 On-board Sequence. Pedestrian Dataset
| The sequence was acquired on-board under normal urban driving conditions. The images are monochrome and of 480X960 pixels. We used a 4mm focal length lens, so providing a wide field of view. We drove during 30 minutes approximately, giving rise to a sequence of around 60,000 frames. Then, using steps of 10 frames we annotated all the pedestrians. This turns out in 7,900 annotated pedestrians, 5,400 reasonable and non occluded. We have divided the video sequence into three sequential parts, the first one for training, the last one for testing, in the middle we have leaved a gap for avoiding testing and training with the same persons. Overall we train with 3,600 reasonable pedestrians, and test on 1,300 reasonable ones. |
| Here are some examples of the dataset: |
References to this pedestrian dataset should be made to the following article:
Download: CVC08 On-board Sequence Pedestrian Dataset (1.96 GB)
Please, read the terms of use before downloading the dataset: disclaimer |
CVC-07 DPM Virtual-World Pedestrian Dataset
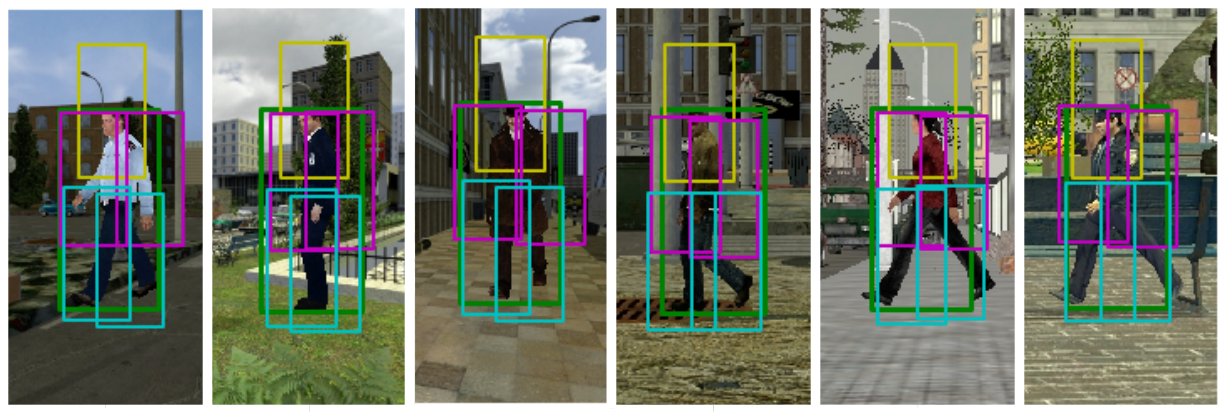
| This dataset contains 2534 pedestrian images and 2000 background images. The pedestrian images have frontal view and left view, which are annotated as ‘M’ and ‘L’. You may flip the pedestrians to get right view examples. Part annotations are also provided. |
| Here are some examples of the dataset: |
 |
References to this pedestrian datset should be made to at least one of the following articles:
Download: CVC07 DPM Virtual-World Dataset (1.3GB)
Please, read the terms of use before downloading the dataset: disclaimer |
CVC-06 Partially Occluded Virtual-World Pedestrian Dataset
| This is a partially occluded pedestrian dataset extracted from our virtual world. The dataset consists of two sets of 2400 and 2414 croped pedestrians (with their corresponding horizontal mirrors). |
| Here are some examples of the dataset: |
 |
References to this pedestrian dataset should be made to the following article:
Download: CVC06-Partially Occluded Pedestrian Dataset (137MB) |
CVC-05 Partially Occluded Pedestrian Dataset
| This is a partially occluded pedestrian dataset. The dataset consists of 593 positive frames with annotated pedestrians (with their corresponding horizontal mirrors). |
| Here are some examples of the dataset: |
 |
References to this pedestrian datasetshould be made to the following article:
Download: CVC05-Partially Occluded Pedestrian Dataset (274MB) |
CVC-04 Virtual-World Pedestrian Dataset 2
| This is the virtual pedestrian dataset, generated using Half-Life 2 graphics engine. The dataset consists of 1208 virtual pedestrians (with their corresponding horizontal mirrors) and 6828 pedestrian-free background images to extract negatives for training. |
| Here are some examples of the dataset: |
 |
References to this pedestrian datasetshould be made to the following article:
Download: CVC04-Virtual-Pedestrian Dataset 2 (2,86GB) |
CVC-03 Virtual-World Pedestrian Dataset
| This is the virtual pedestrian dataset, generated using Half-Life 2 graphics engine. The dataset consists of 1678 virtual pedestrians (with their corresponding horizontal mirrors) and 2048 pedestrian-free background images to extract negatives for training. |
| Here are some examples of the dataset: |
 |
References to this pedestrian datasetshould be made to the following article:
Download: CVC03-Virtual-Pedestrian Dataset (915MB) |
CVC-02 Pedestrian Dataset
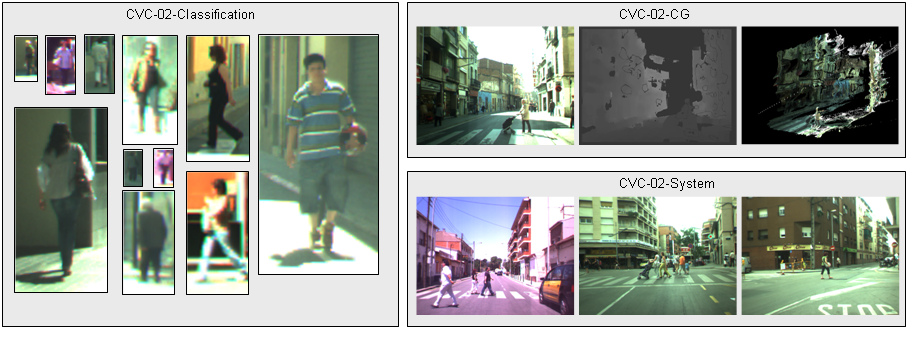
CVC-02 consists of three subsets, each one focused on a different task of pedestrian detection: candidate generation, classification and system evaluation. The imagery has been recorded in urban scenarios around Barcelona (Spain), using a Bumblebee color stereo camera with resolution 640×480 pixels and 6mm focal length. The annotated pedestrians are in the range from 0 to 50 m from the camera, which corresponds to a smallest pedestrian of 12×24 pixels. The main features of each subset are the following:
All the images are provided in lossless PNG format, both in color and depth versions, and in their original size and 64×128 pixels rescaled. Regarding the annotations, we label them as obligatory or optional (very young children, significantly occluded or partially out of the image). |
| Here are some samples of the dataset: |
 |
References to this pedestrian datasetshould be made to the following article:
|
| Download: CVC-02-CandidateGeneration (269MB) Download: CVC-02-Classification (1.5GB) Download: CVC-02-System Sequence 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13, 14, 15 (around 1GB each) Since the complete dataset size is around 12GB we have partitioned it into smaller files. Please, read the terms of use before downloading the dataset: disclaimer |
CVC-01 Pedestrian Dataset
This pedestrian datasetwas recorded in the surreoundings of Barcelona and annotated by the CVC ADAS group in order to evaluate the pedestrian detection algorithms developed. It was originally named CVC-CER-01. Its main features are the following:
|
| Here are some scale-normalized pedestrian examples of the dataset: |
         |
References to this pedestrian datasetshould be made to the following article:
Download: CVC-01 Classification Dataset (83MB) |
Road Image Dataset
This database addresses the need for experimental data to quantitatively evaluate emerging road detection and photometric invariant algorithms. These images were captured using an onboard camera mounted on the windshield of a moving vehicle. The main challenge is dealing with lighting variations and shadows. The database consists (right now) of two sequences acquired on the same scenario at different daytime and under different weather conditions. The first sequence was acquired at noon of a sunny day. The second was acquired in the morning after raining. The camera is a Bumblebee (stereo pairs will be available soon) working with fixed parameters. Road groundtruth has been manually generated. Here are some examples of the database:
| Day sequence | Rain sequence |
 |
 |
References to this database should be made to the following article:
Road Detection Based on Illuminant Invariance. José M. Álvarez and Antonio M. López. In IEEE Transactions on Intelligent Transportation Systems, 2011.
Download: Day Sequence and Rain Sequence