ElektraAutonomous Vehicle developed by CVC & UAB & UPC
CVC-12: Virtual Optical Flow Dataset
CVC-12: Virtual Optical Flow Dataset
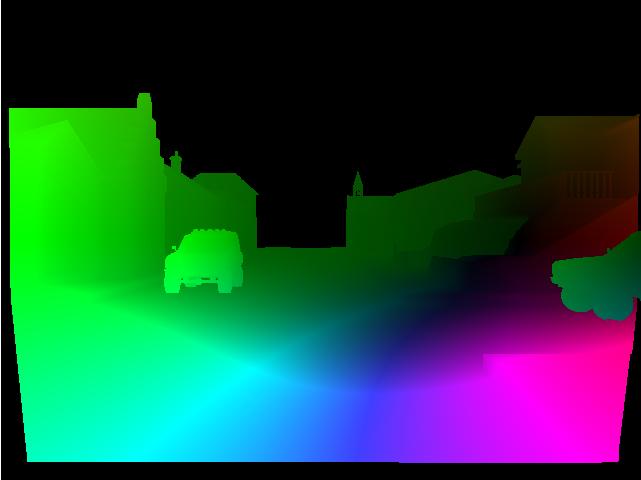
The dataset contains synthetic image sequences of different driving scenarios. This dataset provides ground-truth optical flow for all the sequences. The dataset consists of sequences for scenarios of varying speed of the vehicle and road textures. Four speeds of the on-board camera vehicle and three different road textures are considered. Also sequences with complex motion of on-board camera vehicle with few moving vehicles in the scene are provided for all the combinations of speeds and textures. The speed is denoted Sx and Texture is denoted as Tx. The ground-truth is same for all the textured textured sequences of a particular speed. It includes a Matlab that can be used to read the ground-truth data.
Exampes
Sequence of lowest speed (1x): There are 40 frames.




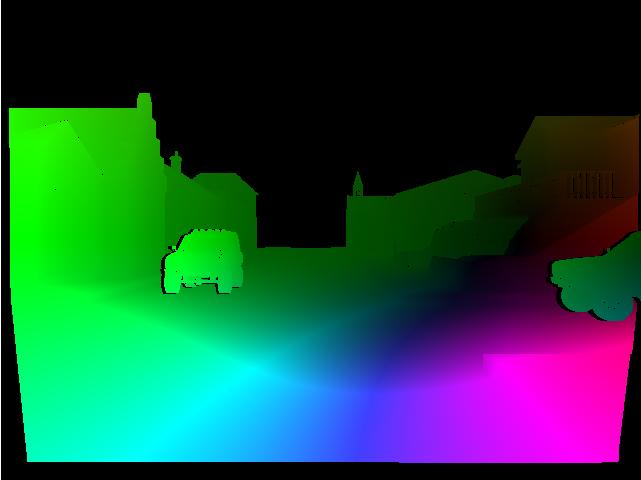
Sequence of higher speed (2x): There are 20 frames.



Sequence of higher speed (3x): There are 13 frames.



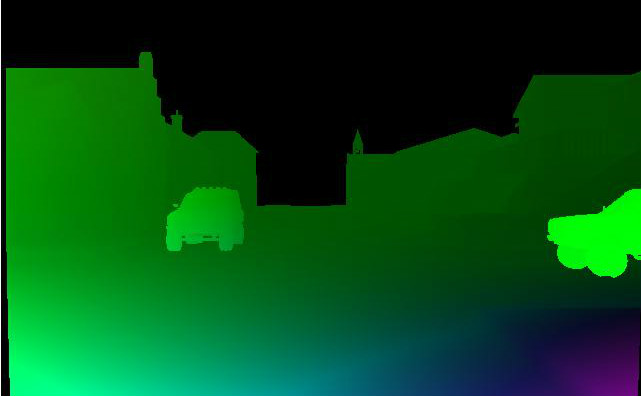
Sequence of higher speed (4x): There are 10 frames.



Complex sequence of lowest speed (1x): There are 10 frames.




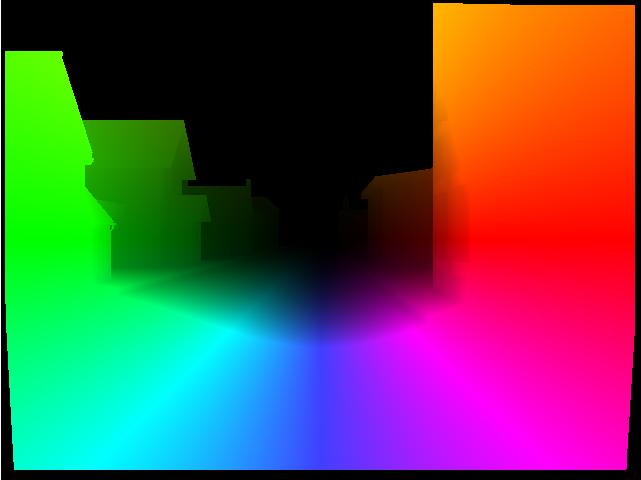
Complex sequence of lowest speed (2x): There are 10 frames.



Complex sequence of lowest speed (3x): There are 10 frames.



Complex sequence of lowest speed (4x): There are 10 frames.