ElektraAutonomous Vehicle developed by CVC & UAB & UPC
ACDC: Automated Cooperative Driving in the City

ACDC: Automated Cooperative Driving in the City
The massive use of automobiles was a major benefit in terms of personal mobility and sense of freedom. However, this was at the expense of significant drawbacks: traffic accidents and environmental contamination; both factors end up in healthy issues and in a huge economic cost. Moreover, half the world’s population is living in cities (70% predicted for 2050), which strains city traffic more and more. Thus, mobility based on personal automobiles does not provide a sense of freedom and comfort anymore.
These considerations lead us to think that personal automobiles, as they are operating now, do not fit well the future cities that industrialized countries are designing, i.e., the smart cities. For becoming a smart city, municipalities must rethink road usage.
Accordingly, in addition to improving the current public system focused on transporting masses at once (trams, metro), we imagine a centralized system in the city receiving mobility petitions from users all around this city. The city controls a fleet of automated vehicles (i.e., driverless) that cooperate among them and with other elements of the city like infrastructure surveillance cameras, semaphores, etc., to move safely, comfortably, saving energy and minimizing congestion. The central control of the fleet assigns missions to its vehicles, i.e., for going door-to-door picking up users where they are and leaving them exactly where they want. The user can specify if he/she needs a special vehicle (e.g., for handicapped persons), if he/she is happy to share the vehicle with other persons, etc. Moreover, we conceive these vehicles as electrical ones for drastically reducing the in-city pollution.
The “Automated and Cooperative Driving in the City (ACDC)” proposal is our first step towards this dream. In particular, the focus of ACDC is to develop an intelligent system for self-driving cars that belong to a fleet which is performing a coordinated mobility action in the city.
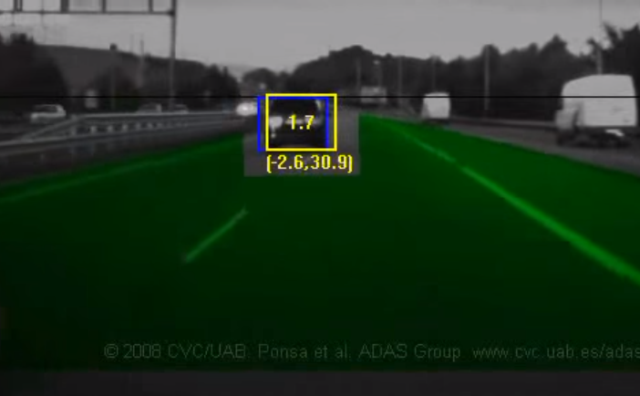
Therefore, in ACDC it is essential that the vehicles of the fleet can cooperate. Furthermore,perceiving the environment (pedestrians, drivable road, etc.) is also a core capability toensure a reliable self-driving, and for the gradual implantation of these systems which forces cohabitation with nowadays vehicles (without cooperation capabilities).
ACDC focuses on developing advanced software for processing data coming from relatively cheap sensors, rather than assuming the use of expensive sensors just to reduce the complexity of interpreting the data. Thus, from the scientific point of view, ACDC is in the realm of artificial intelligence, machine learning, planning and control, as well as computer vision and general sensor information processing and fusion.
ACDC has the support of 8 EPOs, and would be developed by a large interdisciplinary team with more than a decade of experience on advanced driver assistance systems (ADAS). CVC team has already important resources for doing the project, namely, an electric vehicle that can be driven according to computer commands, different sensors for perception, as well as software for detecting objects in urban scenarios, road marks, etc.
Duration: 2015-2018
Principal Investigator: Antonio M. López & David Vázquez
Funding: TRA2014-57088-C2-1-R
Participants: Researchers from the Computer Vision Center