ElektraAutonomous Vehicle developed by CVC & UAB & UPC
Lane Markings Detection

Lane Markings Detection
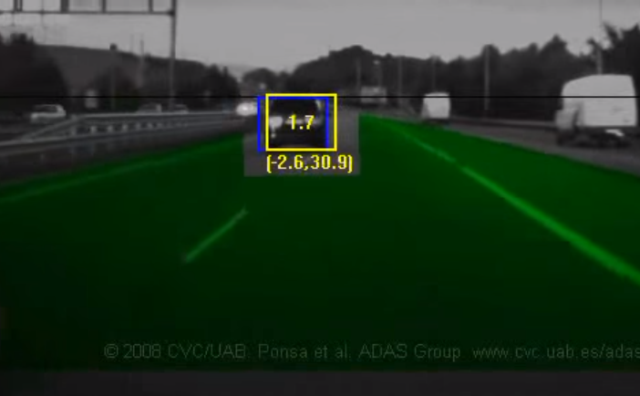
Lane Markings Detection is useful for many different ADAS: to maintain the vehicle on the lane in case of driver’s drowsiness, to detect dangerous lane changes (when combined with back-viewing sensors), to assisting in the steering wheel torque, etc.
Detection of lane markings based on a camera sensor can be a low cost solution to lane departure warning and lateral control. However, reliable detection is difficult due to cast shadows, vehicles occluding the marks, wear, vehicle motion, etc. In our work we propose to use the ridgeness as a low-level descriptor to detect and characterize the lane markings. RANSAC is used to fit a parametric model to the curvature of the lanes in the image.
Title: Lane Markings Detection
Duration: 2002
Principal Investigator: Antonio M. López
Funding: SEAT CT and Volkswagen AG
Participants: Antonio M. López, Cristina Cañero, Jordi Saludes, Joan Serrat, Felipe Lumbreras