ElektraAutonomous Vehicle developed by CVC & UAB & UPC
CVC-13: Multimodal Stereo Dataset

CVC-13: Multimodal Stereo Dataset
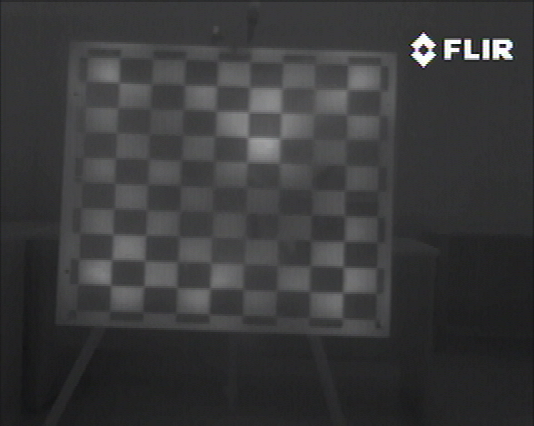
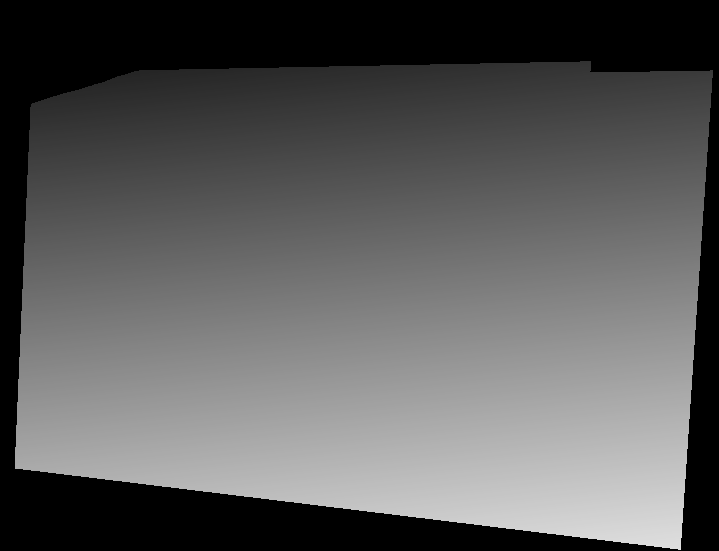
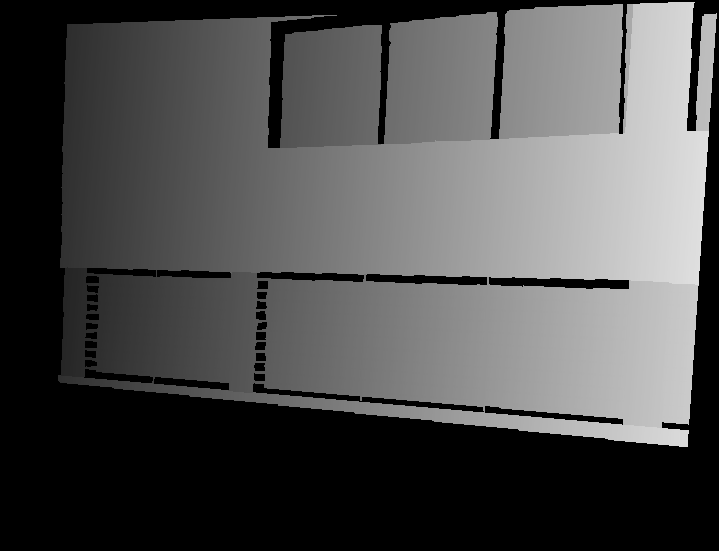
CVC-Multimodal Stereo Dataset consists of three subsets of multimodal stereo images (visible and infrared), each one containing a different family of scenarios: Roads, Facades, and Smooth Surfaces. Each subset contains images taken in different conditions and days. For every couple of multimodal stereo images a real or a synthetic depth map, to be used as a ground truth, is given. Additionally, the corresponding calibration sets are also provided.
The images have been recorded using a multimodal stereo rig with the following characteristics:
- Color camera: Sony ICX084 Bayer pattern CCD, 6mm focal length lens, 640×480 image resolution (Bumblebee 2 stereo).
- Infrared camera: PathFindIR Flir camera, 19mm focal length lens (36 degree HFOV), 534×426 image resolution.
All the images are provided in lossless PPM and BMP format.
References to this database should be made to the following publication:
- Barrera F., Lumbreras F. and Sappa A., “Multimodal Stereo Vision System: 3D Data Extraction and Algorithm Evaluation”, IEEE Journal of Selected Topics in Signal Processing, Vol. 6, No. 5, September 2012, pp. 437-446.
Calibration
| Sets of Calibration Pattern | ||
| Name | Visible | Infrared |
| Calibration Dataset (148MB) | 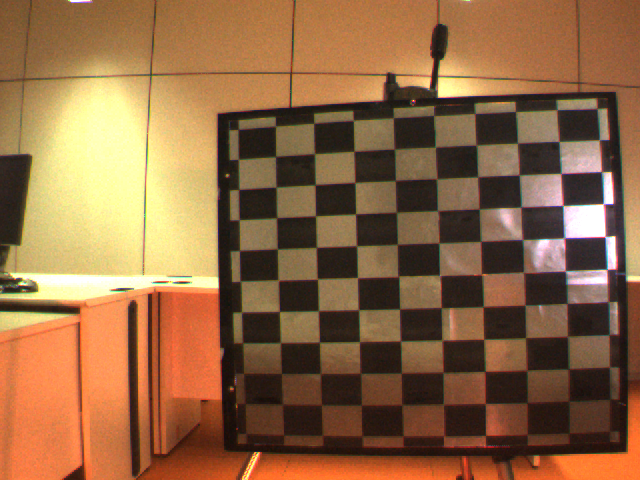 |
 |
Our calibration data, valid range till 20m.
Evaluation and validation
| Sets of Images | |||
| Name | Visible | Infrared | Groundtruth |
| Roads (11.8MB) |  |
 |
 |
| Facades (4.4MB) |  |
 |
 |
| Smooth Surfaces (129MB) |  |
 |
 |
| OSU Color-Thermal Database*** |  |
 |
+/- 2px |
***This benchmark belongs to OTCBVS, see the link for more datails.


