Elektra
ElektraAutonomous Vehicle developed by CVC & UAB & UPC
3D Stereo Reconstruction
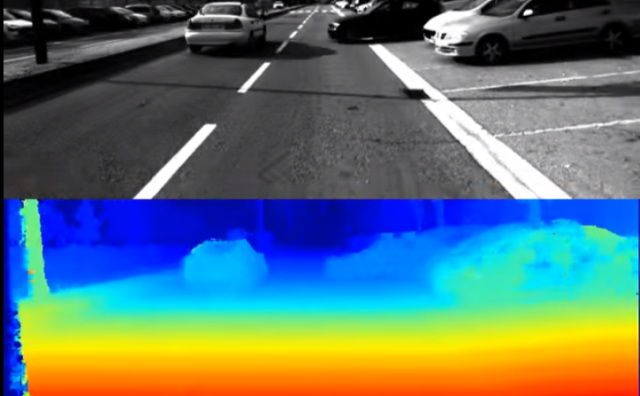
3D Stereo Reconstruction
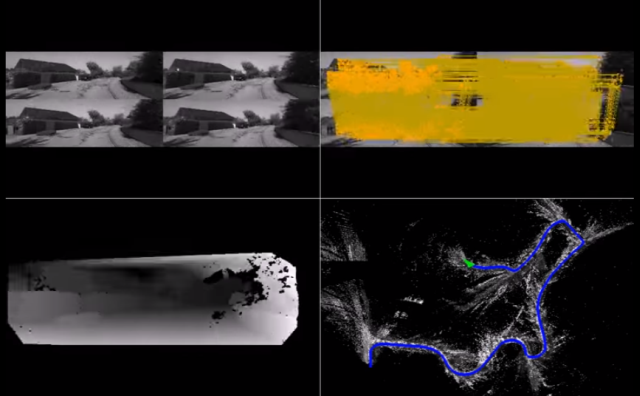
Robust and dense computation of depth information from stereo-camera systems is a computationally demanding requirement for real-time autonomous driving. Semi-Global Matching (SGM) approximates heavy-computation global algorithms results but with lower computational complexity, therefore it is a good candidate for a real-time implementation. SGM minimizes energy along several 1D paths across the image. The aim of this research area is to provide a real-time systems producing reliable results on energy-efficient hardware. Our current design runs on a NVIDIA Titan X GPU at 104.62 FPS and on a NVIDIA Drive PX at 6.7 FPS, promising for real-time platforms.
Related publications
All
Journals
Conferences
Books
Book Chapters
Technical Reports