ElektraAutonomous Vehicle developed by CVC & UAB & UPC
Pedestrian Detection
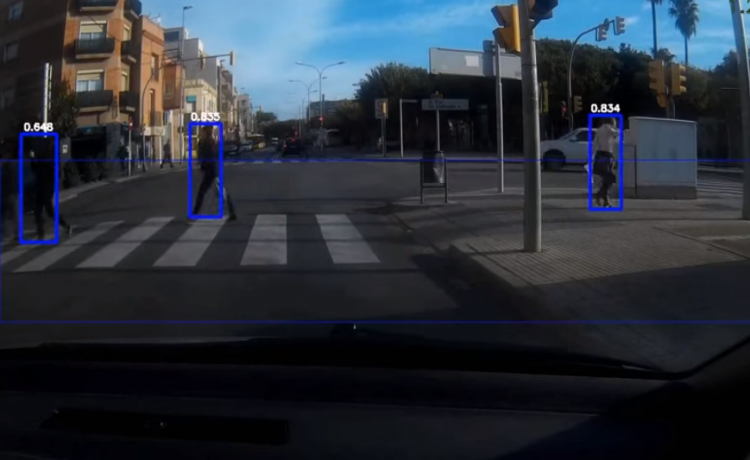
Pedestrian Detection
Pedestrian accidents are the second source of traffic injuries and fatalities in the European Union. In this sense, advanced driver assistance systems (ADAS), and specifically pedestrian protection systems (PPS), have become an important field of research to improve traffic safety. Of course, in order to avoid collisions with pedestrians they must be detected, being camera sensors key due to the rich amount of cues and high resolution they provide.
Currently there are two main lines of work, one based on images of the visible spectrum, and the other, mainly motivated by nighttime, based on thermal infrared. The former has accumulated more literature because the easier availability of either CCD or CMOS sensors working in the visible spectrum, their cheaper price, better signal-to-noise ratio and resolution, and because most of the accidents happen at daytime. At the moment, we work with this visible spectrum images.
In this context, difficulties of the pedestrian detection task for PPS arise both from working with a mobile platform in an outdoor scenario, recurrent challenge in all ADAS applications, and from dealing with a so aspect-changing class like pedestrians. Difficulties can be summarized in the followings:
- targets have a very high intra-class variability (e.g., clothes, illumination, distance, size, etc.);
- background can be cluttered and change in milliseconds;
- targets and camera usually follow different unknown movements;
- and fast system reaction together with a very robust response is required.
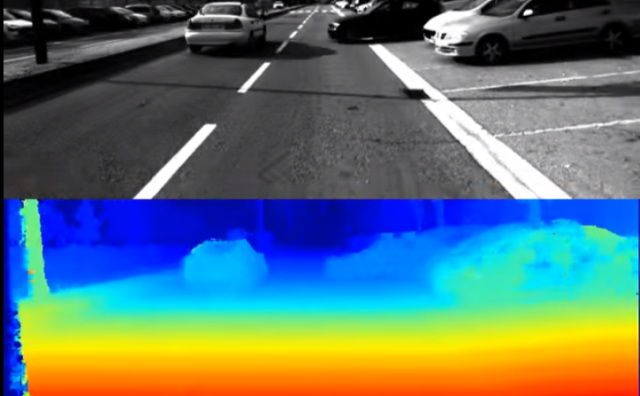
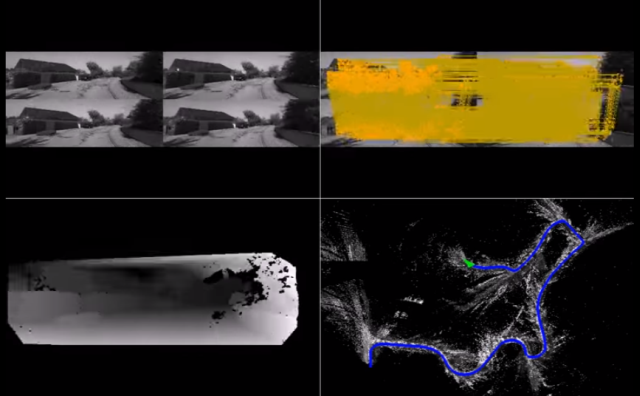
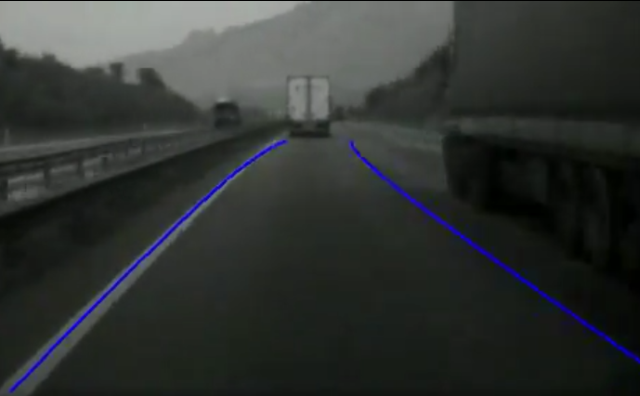
The following figures correspond to the proposed pedestrian detection architecture we propose. It is divided in six different steps, each one with its own responsibilities inside the system. At the moment we just address the first three ones, i.e., pre-processing, foreground segmentation and classification. The center figure illustrates the plane computation technique which is aimed at defining a set of pedestrian-sized windows laying on the 3D ground. The idea is to estimate the road pitch orientation related to the camera by using RANSAC on the 3D stereo points Y-Z projection. The right one is the classification stage, where the selected windows are classified as pedestrian/non-pedestrian by using AdaBoost and two combined sets of features.