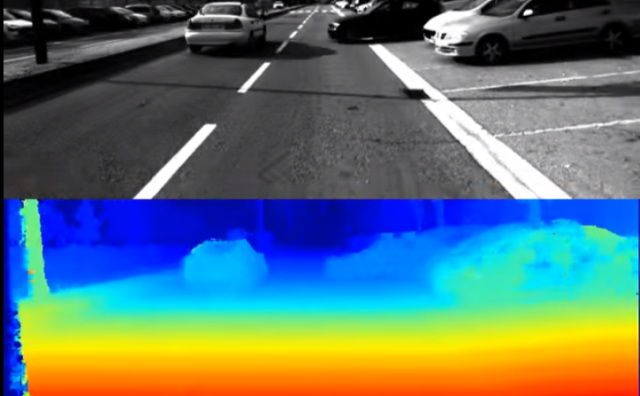
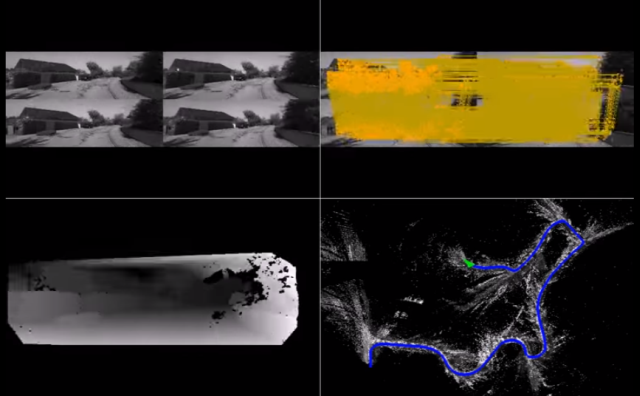
ElektraAutonomous Vehicle developed by CVC & UAB & UPC
Vehicle Control

Vehicle Control
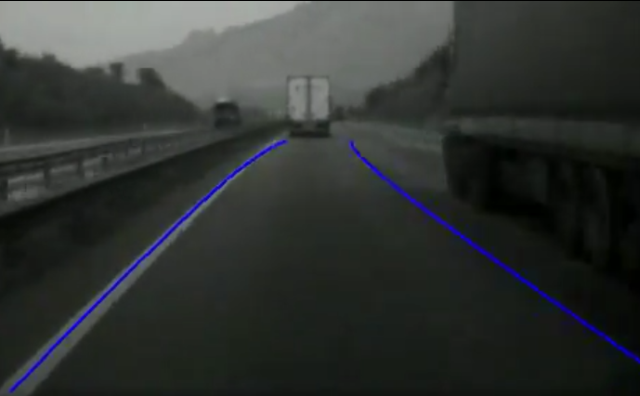
Car controls generally refers to controls in cars and most other powered road vehicles, including trucks, buses, and specialized vehicles (e.g. heavy equipment), that are used for driving, parking, and passenger comfort and safety. Modern car controls are now standardised, but this was not always the case. Controls are evolving in response to new technologies, for example the electric car or the autonomous car.
We research on different nonlinear model-based control strategies for autonomous cars. A control oriented model of vehicle based on a bicycle model is used. The control strategies use a model reference approach. Using this approach, the error dynamics model is developed. These controllers receive as input the longitudinal, lateral and orientation errors generating as control outputs the steering angle and the velocity of the vehicle.