Elektra
ElektraAutonomous Vehicle developed by CVC & UAB & UPC
Lane Marking
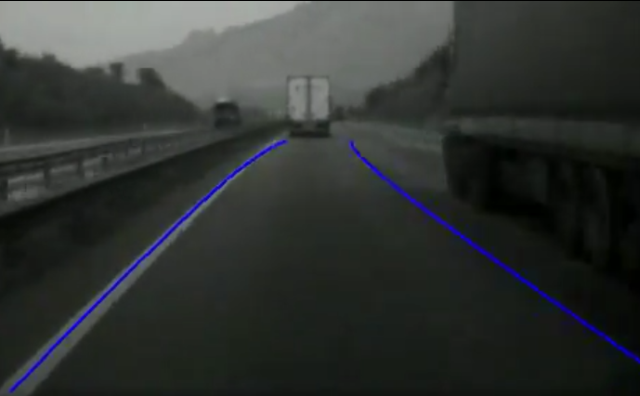
Lane Marking
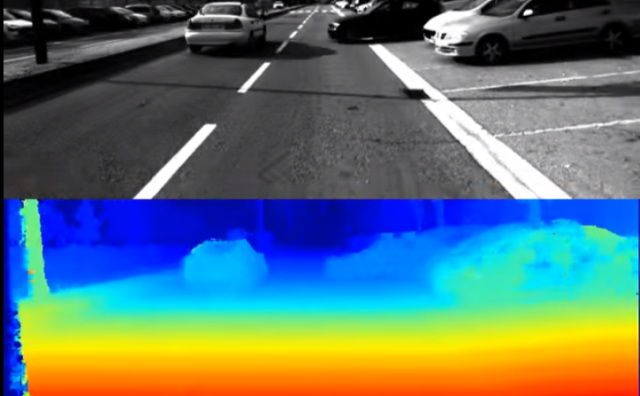
Detection of lane markings based on a camera sensor can be a low cost solution to lane departure and curve over speed warning. A number of methods and implementations have been reported in the literature. However, reliable detection is still an issue due to cast shadows, wearied and occluded markings, variable ambient lighting conditions etc. We focus on increasing the reliability of detection and at the same time compute relevant road geometric parameters like curvature, lane width and vehicle position within its lane. Video sequences are processed frame by frame, that is, no temporal coherence or continuity has been enforced. Our method is able to run at least at 40 ms.
Related publications
All
Journals
Conferences
Books
Book Chapters
Technical Reports