Elektra
ElektraAutonomous Vehicle developed by CVC & UAB & UPC
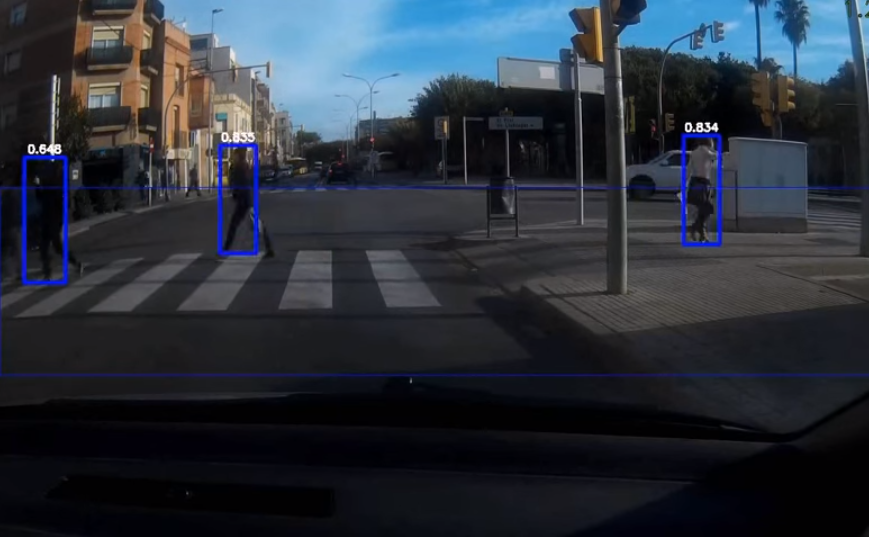
Obstacle Avoidance

Obstacle Avoidance
Obstacle avoidance is the task of satisfying some control objective subject to non-intersection or non-collision position constraints. In autonomous vehicles, it is a hot topic. What is critical about obstacle avoidance concept in this area is the growing need of usage of autonomous vehicle vehicles in urban areas. Normally obstacle avoidance is considered to be distinct from path planning in that one is usually implemented as a reactive control law while the other involves the pre-computation of an obstacle-free path which a controller will then guide a robot along.
Related publications
All
Journals
Conferences
Books
Book Chapters
Technical Reports