ElektraAutonomous Vehicle developed by CVC & UAB & UPC
Road Segmentation

Road Segmentation
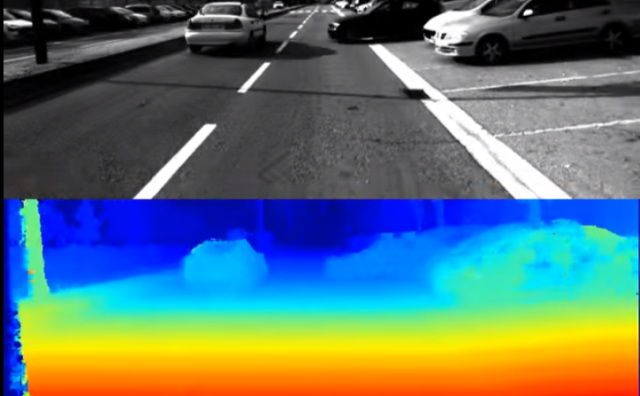
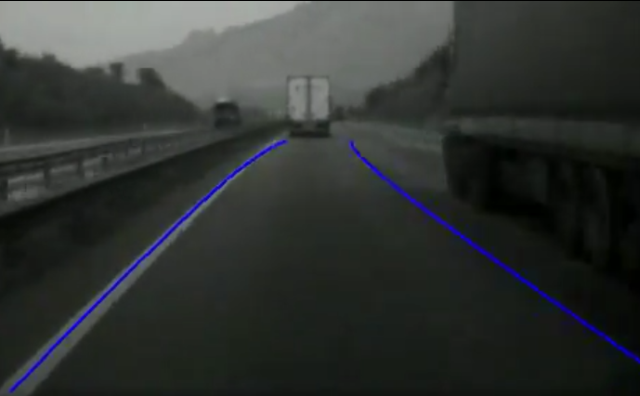
By using an on-board camera it is possible to detect the free road surface ahead of the ego-vehicle. Road detection is of high relevance for autonomous driving, road departure warning and to support driver assistance systems such as vehicle and pedestrian detection. The key for vision-based road detection is the ability to classify image pixels as belonging or not to the road surface. Identifying road pixels is a major challenge due to the intra-class variability caused by lighting conditions. An especially difficult scenario appears when the road surface has both shadowed and non–shadowed areas. Accordingly, we propose a novel approach to vision-based road detection that is robust to shadows. The novelty of our approach relies on using a shadow invariant feature space combined with a model–based classifier The model is built on-line to improve the adaptability of the algorithm to the current lighting and the presence of other vehicles in the scene. The proposed algorithm works in still images and does not depend either on road shape or temporal restrictions. Quantitative and qualitative results are presented to support the validity of our proposal.