Elektra
ElektraAutonomous Vehicle developed by CVC & UAB & UPC
Vehicle Detection

Vehicle Detection
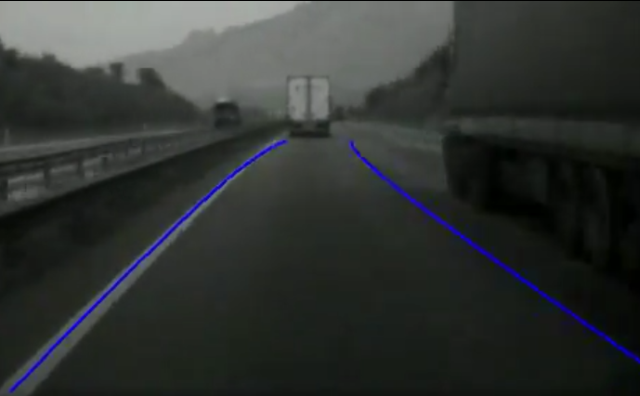
Determining the position of other vehicles on the road is a key information to help driver assistance systems to increase driver’s safety. Accordingly, the work presented in this paper addresses the problem of detecting the vehicles in front of our own one and estimating their 3D position by using a single monochrome camera. Rather than using predefined high level image features as symmetry, shadow search, etc., our proposal for the vehicle detection is based on a learning process that determines, from a training set, which are the best features to distinguish vehicles from non–vehicles.
Related publications
All
Journals
Conferences
Books
Book Chapters
Technical Reports